PIC-Controller - Home of Manuel Magninch
Hauptmenü:
- Homepage
- Tesla
-
Eigenbau
- Servo Thermometer
- Galvanisieren
- CryptoMining
- MiningFarm
- MusikPlayer Volumio
- Versärker JLH 1969
- Lautsprecher Solo 100
- Lautsprecher 3D-Druck
- KaffeTassenWaermer
- Radio Kondensator Bau
- Radio Drehkondensator
- Radio LW MW VariCap
- Radio MW Detektor
- BLDC Motor 3D Brushless
- Magnetrührer 3D-Druck
- ATS mit Relay
- Audio-Verst-zu-ELA100V
-
Elektronik
- Elektronik Selbstbau
- NE555
- DC/DC Converter
- Timer diskret
- Versärker Diskret
- Induktivitäten
- Ferrit-Kerne Material-Messen
- Pulver-Kerne Liste
- Sensoren
- Levitron
- Telefon Klingel
- Transformator Leistung
- Transformator Selbstbauen
- Heizung DIY
- Temperatur Schalter mit Dioden
- SPI-Big-7-Seg-5xLED
- Amp_4xBC547
- Schall-Dekoder
- NachtLich230VTriac
- Blitz Detektor, LW-Radio
- Current-Detector
-
Controller
- PIC-Controller
- Raspberry Pico Install
- Raspberry Pico InternTemp
- Raspberry Pico Servo Thermometer
- Raspberry Pico Servo
- Raspberry Pico SPS
- LCD I2C Python
- Raspberry Pico Barometer
- Raspberry Pico Multimeter
- Raspberry Pico DCF77 Uhr
- Raspberry Pico 50Hz Mon
- Raspberry Metal Detector
- Raspberry Pico IR Decoder
- Raspberry Pico EEprom 24C
- Raspberry Pico NTC
- Raspberry Pico Erbeben Sensor
- Raspberry PI RC-ADC
- Philips HUE PC Controller
-
Blog
- Titan das Super Metall
- Direkte Demokratie
- Abfall Aadorf
- Licht am Auto
- PCs ausschalten
- HomeOffice keine Alternative
- Abstimmung Sommerzeit
- Wer zahlt die Gebühren
- Wer zahlt die MWSt Erhöhung
- FTTH Gemeinde Aadorf
- Crypto AG - Skandal
- Mangelnde Medien Qualität
- Netz Energie-Speicher
- Job oder Erfüllung
- Hat Licht eine Masse
- Blackout Spanien
- Lichterkreis Sichtung
- Kontakt
PIC-Controller

PIC Microcontroller HOWTO
Author: Manuel Magnin - MMagnin(a)Clinch.ch
Datum: 12. April 2017
Quelle: http://www.clinch.ch/clinch/PIC/PIC-Controller.htm
Version: V0.0
Geändert: ...
Dieses Dokument soll die grundlegenden Schritte zur Erstellung einer PIC programmier und Entwicklungsumgebung aufzeigen.
Dieses Zusammenstellung ist für Mess- und Steueraufgaben gedacht und ausgelegt.
Die PIC Familie hat folgende Eigenschaften:
- Sehr robuster Aufbau, grosse Toleranzen (betriebsstabil)
- Starke Ausgangstreiber 25mA (Nach Masse und nach Vdd), DIL-Gehäuse (und andere)
- Sehr simpler Assembler RISC Befehls-Satz bestehend aus 35 Befehlen
- Enfache und vielseitige Beschaltung der Oszilatoren (Quarz, extern, R/C, R, intern)
- Minimaler Stromverbrauch bei geringen Taktraten und Spannungen (2mA, 5V, 4MHz / 15uA, 3V, 32kHz, <1uA Sleep)
- Einfache Programmierung und Reprogrammierung (Flash)
Übersicht der wichtigen DIL18 Typen:
Die PIC Microcontroller eignen sich speziell für kleine Steueraufgaben, da diese günstig und einfach zu programmieren sind.
Die Controller können mit einfachsten mitteln in der Schaltung programmiert werden. Es sind nur wenige externe Bauteile für den Berieb notwendig.
| MCU Typ | Gehäuse | Flash / RAM | I/O Lines | Preis | Bemerkungen |
| PIC 16F84A | DIL18 | 1kWord / 68Byte | 13 | 2.00 | 1Ti,Oldtimer |
| PIC 16F627 | DIL18 | 1kWord / 224Byte | 16 | 1.50 | PWM,3xTi,Compar |
| PIC 16F628 | DIL18 | 2kWord / 224Byte | 16 | 1.70 | RS232,PWM,3xTi,Compar |
| PIC 16F648 | DIL18 | 4kWord / 256Byte | 16 | 2.00 | RS232,PWM,3xTi,Compar |
| PIC 16F818 | DIL18 | 1kWord / 128Byte | 16 | 1.80 | 5xADC10,PWM,SPI,I2C,2xTi, ab 87uA |
| PIC 16F819 | DIL18 | 2kWord / 256Byte | 16 | 2.20 | 5xADC10,PWM,SPI,I2C,2xTi, ab 87uA |
| PIC 18F1220 | DIL18 | 2kWord / 256Byte | 16 | 2.50 | RS232,7xADC10,PWM,4xTi |
| PIC 18F1320 | DIL18 | 4kWord / 256Byte | 16 | 2.70 | RS232,7xADC10,PWM,4xTi |
| PIC
Incircuit Programmer mit ICSP Schnittstelle. Der Programmierer ist
kompatibel zu WinXP bis Win10 und läuft sowohl mit RS232
(+-12V)
Schnittstellen (PC Integriert), so wie mit USB zu RS232 Wandlern (mit
+-5V). Um alles zu vereinfachen wurde ein Entwiklungsboard erstellt (mit Platine) das den Programmer mit enthält. Zur Programmierung von PICs in der Schaltung kann bei diesem Board nur der Programmerteil mit dem ICSP Port verwendet werden. Wenn mit dem ICSP Port und einem Kabel ein PIC auf einer anderen Platine programmiert werden soll, so darf keim PIC auf der Platine des ICSP Programmers stecken. Der 10k Widerstad und die Dioder am Pin 4 (Vpp) ist nur beim 16F84 notwendig. Je nach PIC Typ werden die Pins OSC1, OSC2 & Vpp nicht benötigt, dann können diese auch als ein oder Ausgang für Steuerzwecke genutzt werden. D.h. im besten Fall stehen von den DIL 18Pin's ganze 16 Pin's für Ein- und Ausgänge zur Verfügung. |
 |
Übersicht der Taktgeneratoren:
| MCP | Standard | R / C | Intern | Bemerkungen |
| PIC 16F84A | Quarz | 30k - 4MHz | - | 22pF+10k=2MHz, 330p+56k=4MHz |
| PIC 16F62x | Quarz, 15-30pF | R ohne C: 10k - 8MHz | ja | nur-R: 1k=10MHz, 10k=1.6MHz, 47k=3MHz |
| PIC 16F64x | Quarz, 15-30pF | 30k-4MHz/3-100k, >20pF | - | 100pF+5k=1MHz, 22pF+10k=2MHz, 22pF+5k=4M, 100p+10k=0.6MHz |
| PIC 16F818 | Quarz, 15-30pF |
30k-4MHz/3-100k, >20pF |
32k-8MHz | nur-R:
1k=10MHz, 10k=1.6MHz, 47k=3MHz |
| PIC 18F1220 | Quarz | 30k-4MHz/3-100k,>20pF | 125k-8MHz |
RC Taktberechnung: F = 1 / ( (R * C) * Ln( Vdd / (Vdd - Vdd*0.9)) )
für 5V Vdd: F = 1 / ( (R * C) * Ln( 5 / (5 - 5*0.9)) ) => F = 1 / (R * C * 2.3)
für 5V vereinfacht: F [in MHz] = 1 / ( R [in kR] * C [in nF] * 2.3 )
| R | C | F
(Clock) +-10% |
Cyklen/Sek +-10% |
| 100kR | 100nF | 44Hz | 11 |
| 10kR | 100nF | 0.44kHz | 109 |
| 10kR | 10nF | 4.3kHz | 1'087 |
| 100kR | 1nF | 4.3kHz | 1'087 |
| 10kR | 1nF | 43kHz | 10'870 |
| 100kR | 100pF | 43kHz | 10'870 |
| 100kR | 22pF | 0.2MHz | 49'407 |
| 10kR | 100pF | 0.43MHz | 108'696 |
| 10kR | 47pF | 0.93MHz | 231'267 |
| 4.7kR | 100pF | 0.93MHz | 231'267 |
| 4.7kR | 47pF | 1.97MHz | 492'058 |
| 10kR | 22pF | 1.98MHz | 494'071 |
| 4.7kR | 33pF | 2.8MHz | 7000'810 |
| 10k paral. 10k | 22pF | 4.0MHz | 988'142 |
| 4.7kR | 22pF | 4.2MHz | 1'051'215 |
| 3.0kR | 22pF | 6.6MHz | 1'646'904 |
Für einfache Anwendungen eigenen sich: 10kR & 100pF für 0.4MHz und 10kR & 22pF für 2MHz
Für passende Timer (+-10%) eignen sich: 5kR & 22pF oder 4.7kR & 22pF für ca. 4MHz


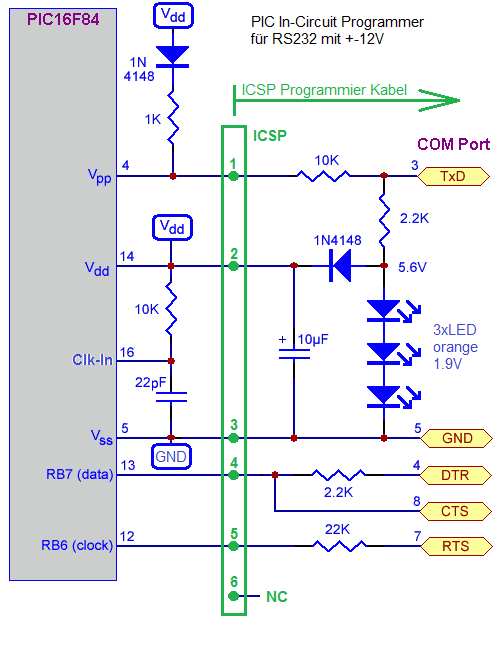
Programmier-Kabel (nur für PC integrierte RS232 Schnittstellen ausgelegt!)
Sonst die obige Programmer-Schaltung verwenden, die ist auch für USB zu RS232 & Notebooks ausgelegt:
Um die PIC Kontroller zu programmieren reicht ein einfacher Programmieradapter. Um den Aufwand für die Programmierung und Entwicklung zu reduzieren kann der PIC mit einem Programmierkabel und ein paar Komponenten gleich in der Schaltung programmiert und umprogrammiert werden. Das RC-Glied am Clk-In lässt den PIC nach der Programmierung mit ca. 2MHz schwingen. Vpp wird nach der Programmierung auf ca. Betriebsspannung gebracht und somit in den Betriebsmodus des PICs. Wichtig für den Programmer ist, dass die Schnittstelle mit +-12V arbeitet (PC Schnittstellen auf dem Prozessorboard). USB zu Serial Schnittstellen Adaper Kabel arbeiten meistens mit +-5 oder +-10V. Dies kann mit einem Voltmeter an der Seriellen Schnittstelle gemessen werden: Pin 5(GND) zu Pin 3(TxD). |
 |
Blinker mit PIC
|
 |
Lauflicht mit PIC und 8xLED
|
 |
PIC Assembler Befehlssatz
| ADDLW wert | Addiere W und wert, speichere das Resultat in W | W := W + wert | D,DC,Z |
| ADDLW 0x00 | Teste W und setze Flags D,DC,Z | W := W + 0 | D,DC,Z |
| ADDLW 0xff | verkleinere das Arbeitsregister um eins (Decrement) | W := W - 1 | D,DC,Z |
| ADDWF speicher,F | Adiere W und den Inhalt der Speicheradresse, speichere das Resultat in Speicheradresse |
[speicher] := W + [speicher] | D,DC,Z |
| ADDWF speicher,W | Addiere W und den Inhalt der Speicheradresse, speichere das Resultat in W | W := W + [speicher] | Z |
| ANDLW wert | Logische Bit-Und Operation von wert mit W, speichere das Resultat in W | W := W && wert | Z |
| ANDWF speicher,F | Logische Bit-Und Operation vom Inhalt der
Speicheradr. mit W, speichere das Resultat in Speicheradr. |
[speicher] := W && [speicher] | Z |
| ANDWF speicher,W | Logische Bit-Und Operation vom Inhalt der
Speicheradresse mit W, speichere das Resultat in W |
W := W && [speicher] | Z |
| BCF speicher,bit-nr | Bit löschen speicher, Bit Nummer [0..7], lösche ausgewähltes Bit (auf "0") | - | |
| BSF speicher,bit-nr | Bit setzen speicher, Bit Nummer [0..7], setze ausgewähltes Bit auf "1" | - | |
| BTFSC speich,bit-nr | Teste Bit im Speicher und überspringe nächsten Befehl wenn das Bit "0" ist. | - | |
| BTFSS speich,bit-nr | Teste Bit im Speicher und überspringe nächsten Befehl wenn das Bit "1" ist. | - | |
| CALL label | Springe zum Unterprogramm Label, Rückkehr mit Return, Returnlw | - | |
| CLRF speicher | Lösche den Inhalt des Speichers (=0x00) | [speicher] := 0x00 | Z |
| CLRW | Lösche das W Register des Prozessors | W := 0x00 | Z |
| CLRWDT | den watchdog timer zurücksetzen (Reset / clear watchdog) | TO,PD | |
| COMF speicher,W | nimm den Inhalt der Speicheradresse und invertiere alle
Bits, speichere das Resultat in W |
W:= [speicher] XOR 0xFF | Z |
| COMF speicher,F | nimm den Inhalt der Speicheradr. & invertiere
alle Bits, speichere Resultat in Speicheradr. |
[speicher] := [speicher] XOr 255 | Z |
| DECF speicher,W | Subtrahiere 1 vom Inhalt der Speicheradresse, speichere das Resultat in W | W := [speicher] - 1 | Z |
| DECF speicher,F | Subtrahiere 1 vom Inhalt der Speicheradr., speichere das Resultat in Speicheradr. | [speicher] := [speicher] - 1 | Z |
| DECFSZ speicher,W | Subtrahiere 1 vom Inhalt der
Speicheradresse, speichere das Resultat in W und überspringe nächsten Befehl wenn das Resultat "0" ist. |
W := [speicher] - 1 | - |
| DECFSZ speicher,F | Subtrahiere 1 vom Inhalt der Speicheradr., speichere das Resultat in Speicheradr. und überspringe nächsten Befehl wenn das Resultat "0" ist. | [speicher] := [speicher] - 1 | - |
| GOTO label | Springe zur Marke Label | - | |
| INCF speicher,W | Addiere 1 zum Inhalt der Speicheradresse, speichere das Resultat in W | W := [speicher] + 1 | Z |
| INCF speicher,F | Addiere 1 zum Inhalt der Speicheradr., speichere das Resultat in Speicheradr. | [speicher] := [speicher] + 1 | Z |
| INCFSZ speicher,W | Addiere 1 zum Inhalt der
Speicheradresse, speichere das Resultat in W und überspringe nächsten Befehl wenn das Resultat "0" ist. |
W := [speicher] + 1 | - |
| INCFSZ speicher,F | Addiere 1 zum Inhalt der
Speicheradr., speichere das Resultat in Speicheradr. und überspringe nächsten Befehl wenn das Resultat "0" ist. |
[speicher] := [speicher] + 1 | - |
| IORLW wert | Logische Bit-Or von value mit W, speichere das Resultat in W | W := W !! wert | Z |
| IORWF speicher,F | Logische Bit-Or des Inhalts der Speicheradr. mit W, speichere das Resultat in Speicheradr. |
[speicher] := W !! [speicher] | Z |
| IORWF speicher,W | Logische Bit-Or des Inhalts der Speicheradr. mit W, speichere das Resultat in W | W := W !! [speicher] | Z |
| MOVLW wert | Laden den Wert in das Arbeitsregister W | W := wert | - |
| MOVF speicher,W | Laden den Inhalt der Speicheradresse in das Arbeitsregister W | W := [speicher] | Z |
| MOVF speicher,F | Laden den Inhalt der Speicheradresse in die
Speicheradresse (setzt Z Flag entsprechend) |
[speicher] := [speicher] | Z |
| MOVWF speicher | Speichert das Arbeitsregister W in die Speicheradresse | [speicher] := W | - |
| NOP | No Operation, nache nichts (braucht einen Cyklus) | - | - |
| RETFIE | Return from Interrupt, Rückkehr aus einem Interrupt | - | |
| RETLW wert | Rückkehr aus einem Unterprogramm das mit Call aufgerufen wurde, übergebe Wert | - | |
| RETURN | Rückkehr aus einem Unterprogramm das mit Call aufgerufen wurde | - | |
| RLF speicher,F | Rotiere Bits links durch das Carry Bit "C", speichere das Resultat in Speicheradr. | C | |
| RLF speicher,W | Rotiere Bits nach links durch das Carry Bit "C", speichere das Resultat in W | C | |
| RRF speicher,F | Rotiere Bits rechts durch das Carry Bit "C", speichere das Resultat in Speicheradr. |
C | |
| RRF speicher,W | Rotiere Bits nach rechts durch das Carry Bit "C", speichere das Resultat in W | W := [speicher]>> W | C |
| SLEEP | Versetze den Prozessor in den Schlafmodus (StandBy Mode) | TO,PD | |
| SUBLW wert | Subtrahiere W von wert & speichere das Resultat in W | W := wert - W | C,DC,Z |
| SUBLW speicher,F | Subtrahiere W vom Inhalt der Speicheradr. & speichere das Resultat in Speicheradr. | [speicher] := [speicher] - W | C,DC,Z |
| SUBLW speicher,W | Subtrahiere W vom Inhalt der Speicheradresse & speichere das Resultat in W | W := [speicher] - W | C,DC,Z |
| SWAPF speicher,W | Austausch obere und untere Bytehälfte, speichere das Resultat in W | - | |
| SWAPF speicher,F | Austausch obere und untere Bytehälfte, speichere das Resultat in Speicheradr. | - | |
| XORLW wert | Logische Bit-XOr Operation von wert mit W, speichere das Resultat in W | W := wert XOr W | Z |
| XORWF speicher,F | Logische Bit-XOr Operation
vom Inhalt der Speicheradr. mit W, speichere das Resultat in Speicheradr. |
[speicher] := [speicher] XOr W |
Z |
| XORWF speicher,W | Logische Bit-XOr vom Inhalt der Speicheradr. mit W, speichere das Resultat in W | W :== [speicher] XOr W | Z |
F = Speicher Ort für Resultat ist eine Speicher-Adresse, , die Angabe ,F = Speicher (,F=",1") (Register File Adresse 0x00 bis 0x7F)
bit-nr = Werte 0..7 (Bit1 bis Bit8)
speicher = ist die Adresse deren Inhalt verwendet werden soll (Register File Adresse 0x00 bis 0x7F)
wert = Konstanter Wert der verwendet werden soll
label = Sprung Ziel (Frei wählbarer Begriff, ohne Sonderzeichen und ohne Leerzeichen)
